ISPは長らく組み込みやロボット分野で技術的なノウハウを蓄積してきました。 今回は特に自動運転・ROS に関する取り組みをご紹介します。
2019年から株式会社ティアフォー、埼玉大学 安積研究室、東京大学 加藤研究室(敬称略)と協業し、ROS2のリアルタイム化の検討初期段階から開発に貢献させていただいております。
ROS2 のコントリビュータとして、ROS Discorse で他のエンジニアと仕様を検討させていただいたり、ROS2 コアパッケージに対し PullRequest を出させていただいております。
以下のワーキンググレープやワークショップで発表を行った実績もあります。
ROS2のリアルタイムワーキンググループ(RT WG)での発表に関する記事
※弊社技術紹介サイト
弊社は性能解析や考察を得意としており、ティアフォー様と協力し、独自の性能解析ツールを開発中です。
今年のROSConJPでは、その独自の性能解析ツールの成果を発表予定です。
ティアフォー様とは、自動運転のフレームワークAutoware※の次世代版の開発において、性能解析をしてボトルネックを特定したり、ワークアラウンドや根本対策案を提案しております。
一方で、埼玉大学 安積研究室と協業して、メニーメニーコア KALRAYへの簡易的なROSやROS2のポーティングに貢献してきました。 安積研究室とは、定期的に勉強会を開催したり、お互いの成果や課題を共有しております。
自動運転では、画像から物体検出する処理の性能が非常に大切ですが、ティアフォー様と協業して、様々な最新物体検出モデルを特定プラットフォーム上で精度と速度の比較評価や高速化、ネットワーク自体の改善点を提案した実績もあります。
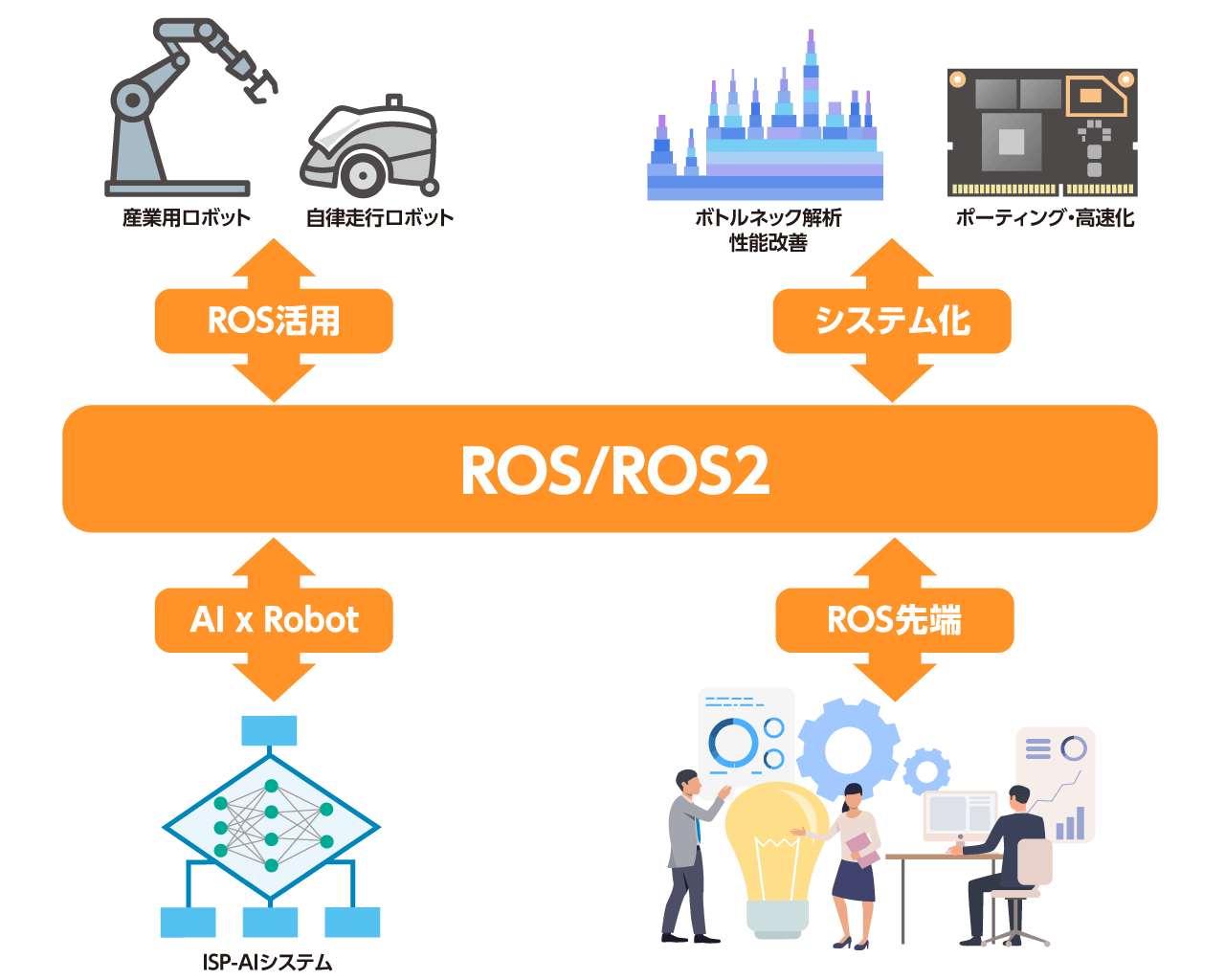
まとめますと、
- 車の自動運転のみならず、産業ロボットやドローンなどの自動運転に関わる技術要素
- ロボット開発プラットフォーム ROS/ROS2 の利用や改修
- 実用に向けたボトルネック解析や性能改善
- ロボットの目や頭脳としての AI 開発
等を幅広くワンストップで保持しておりますので、興味がございましたら、以下にお問い合わせください。
お問い合わせ先
03-5489-0232
ai-contact@isp.co.jp
天津(あまつ)
記載されている会社名、製品名および名称は各社の登録商標または商標です。
※「Autoware」は「The Autoware Foundation」の商標であり、Linux と ROS をベースとしたオープンソースの自動運転ソフトウェアです。