2023年10月17日~20日に富山で開催された、日本航空宇宙学会が主催する「第67回宇宙科学技術連合講演会」(以下、宇科連)で口頭発表をしました。
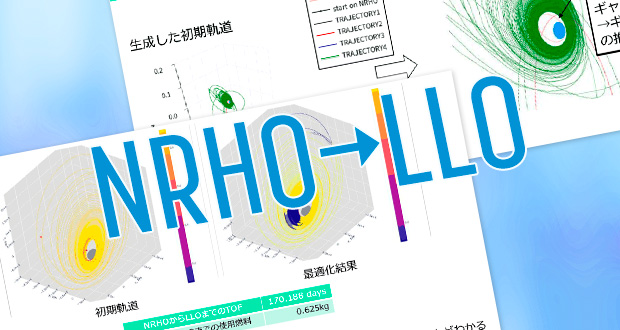
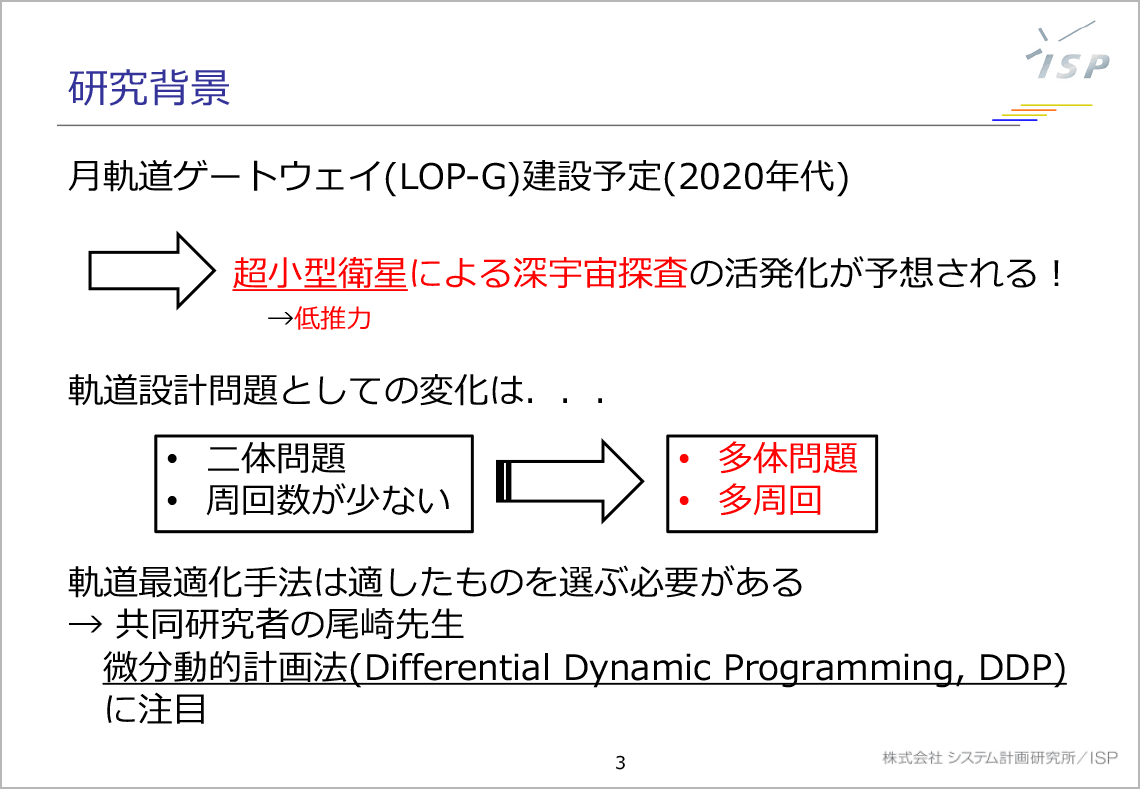
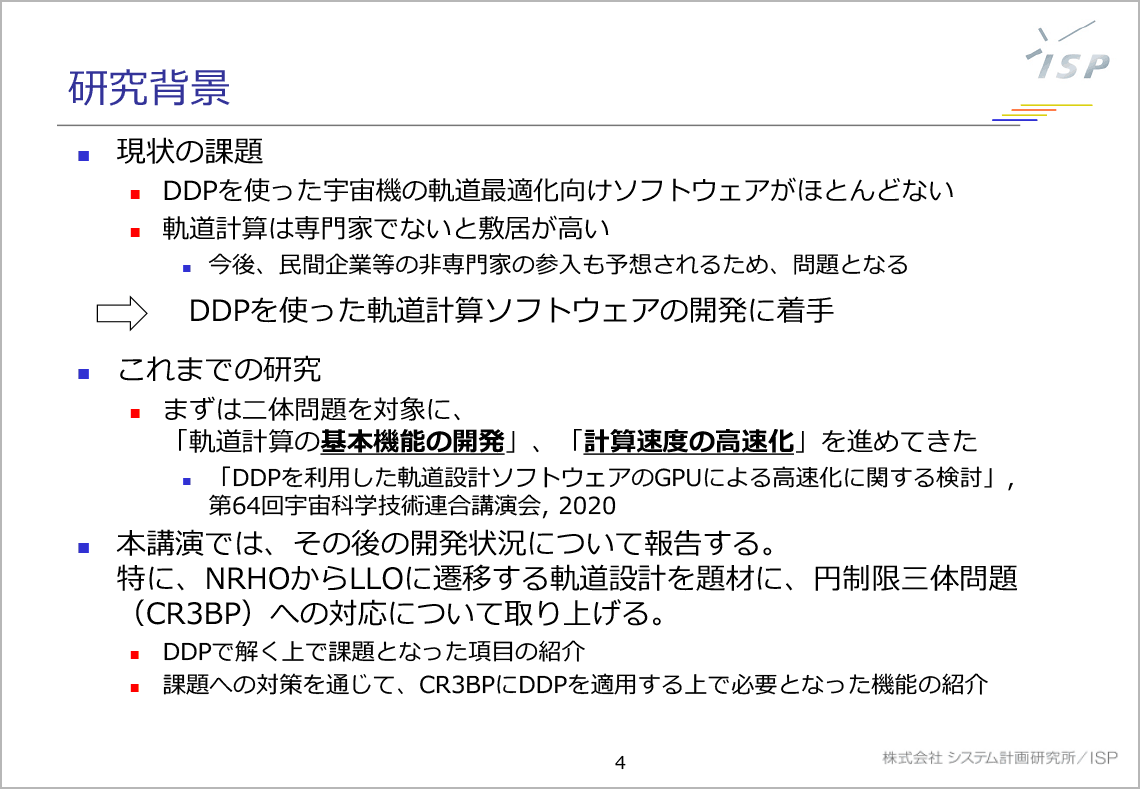
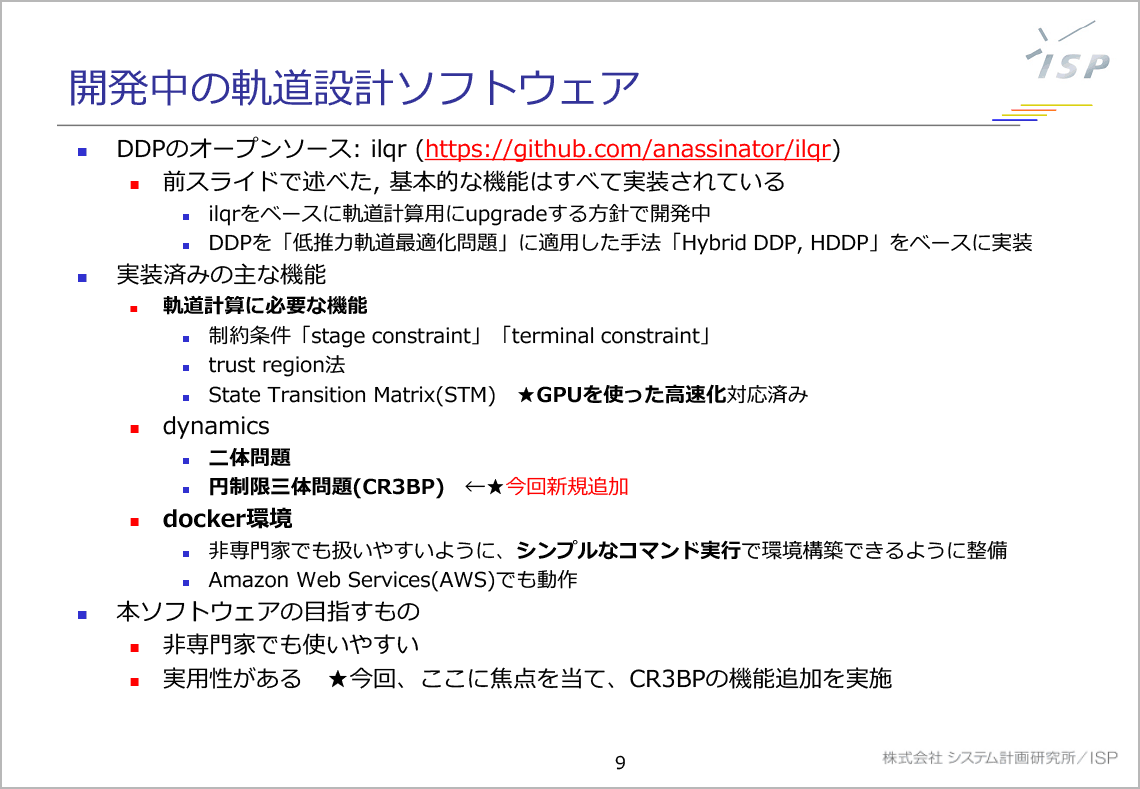
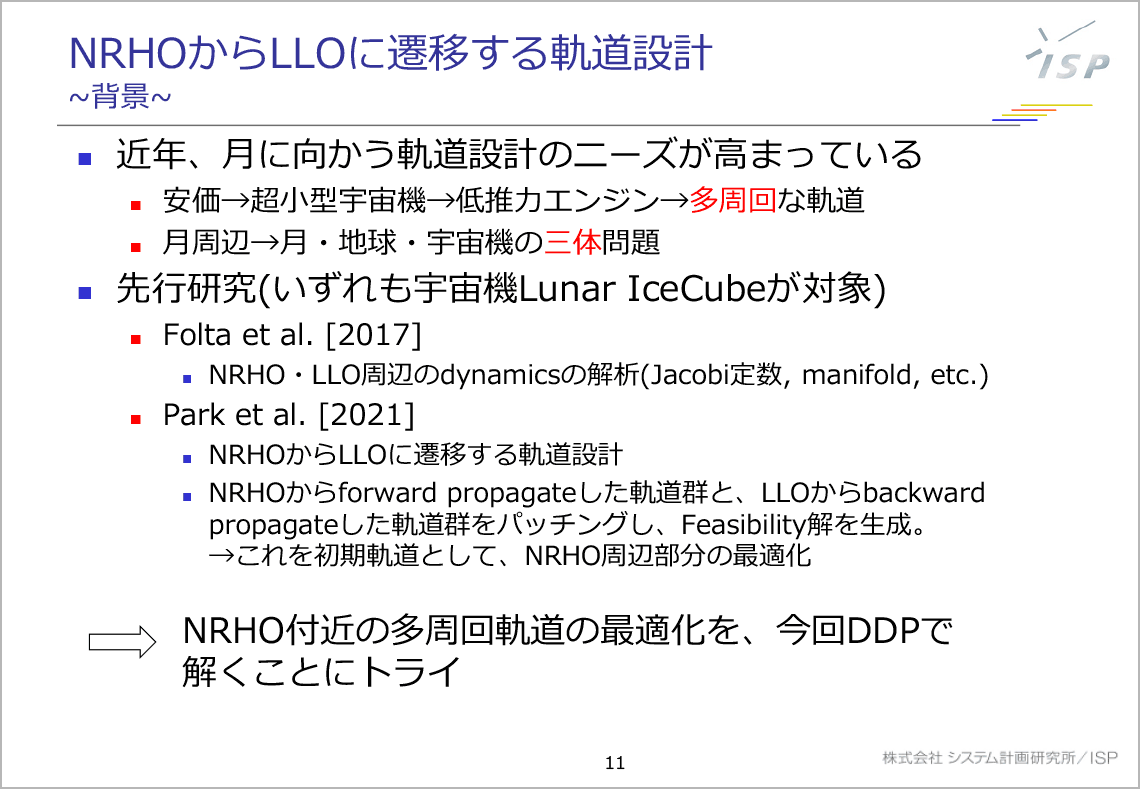
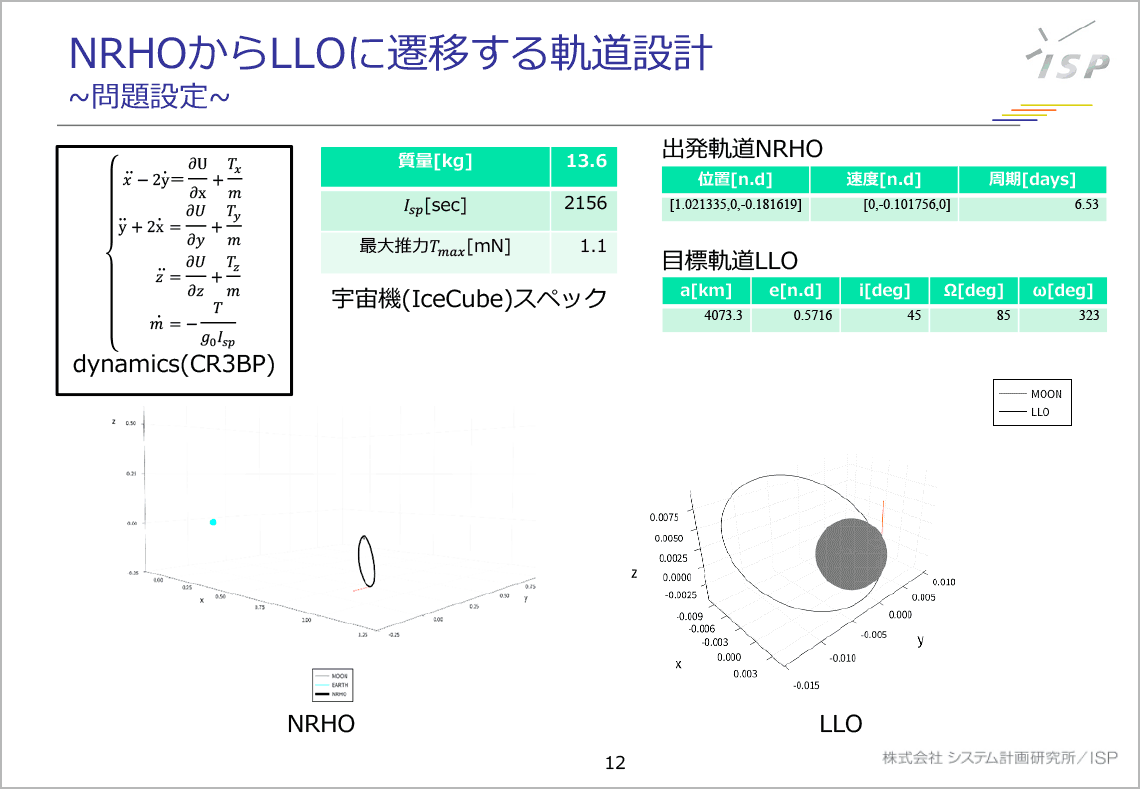
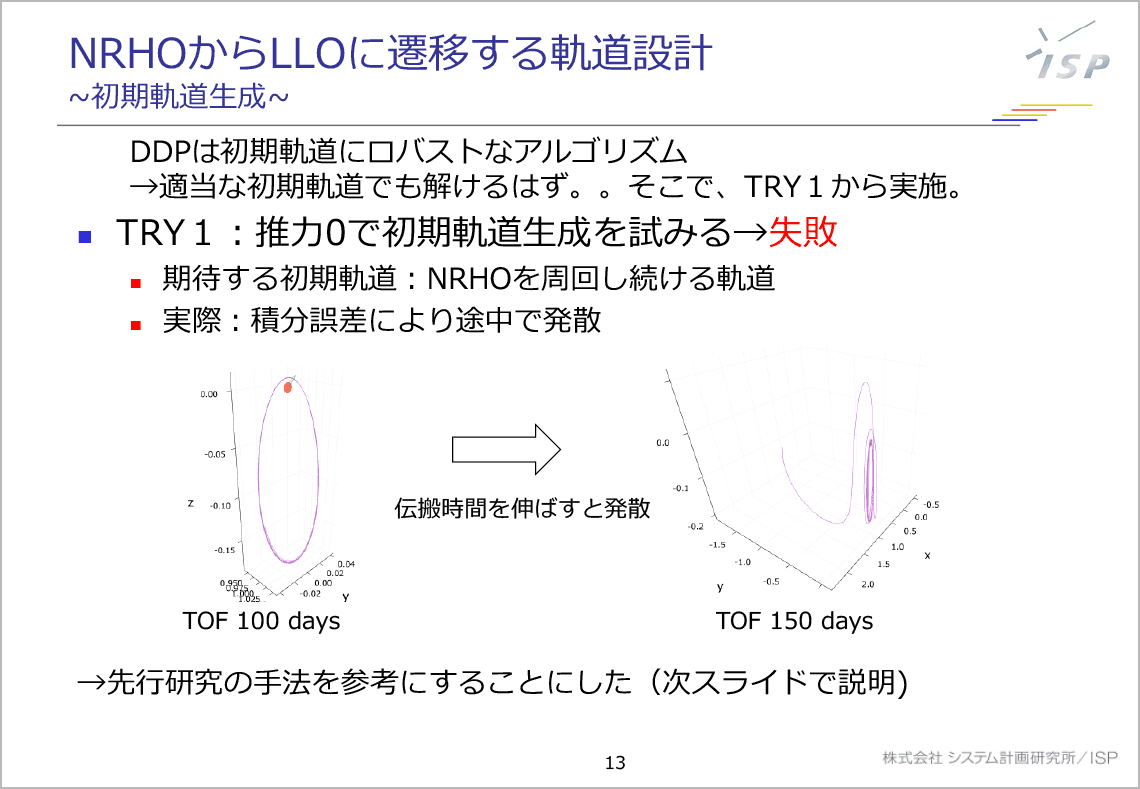
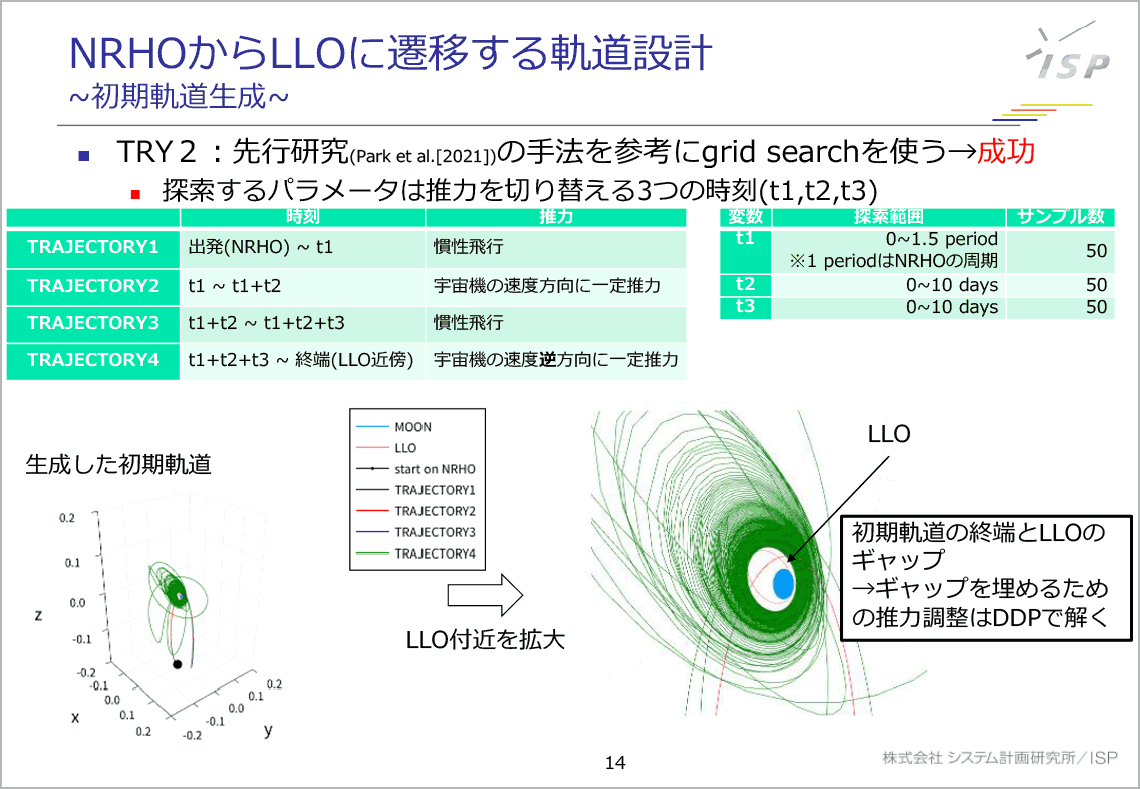
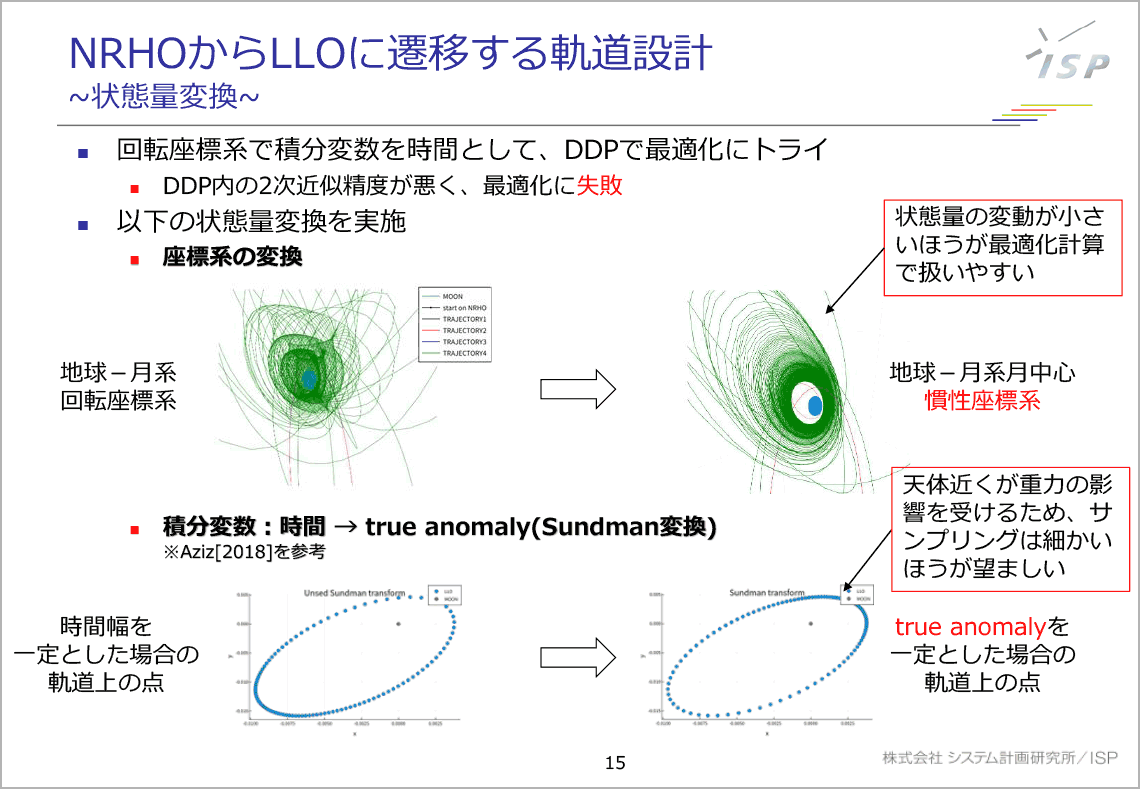
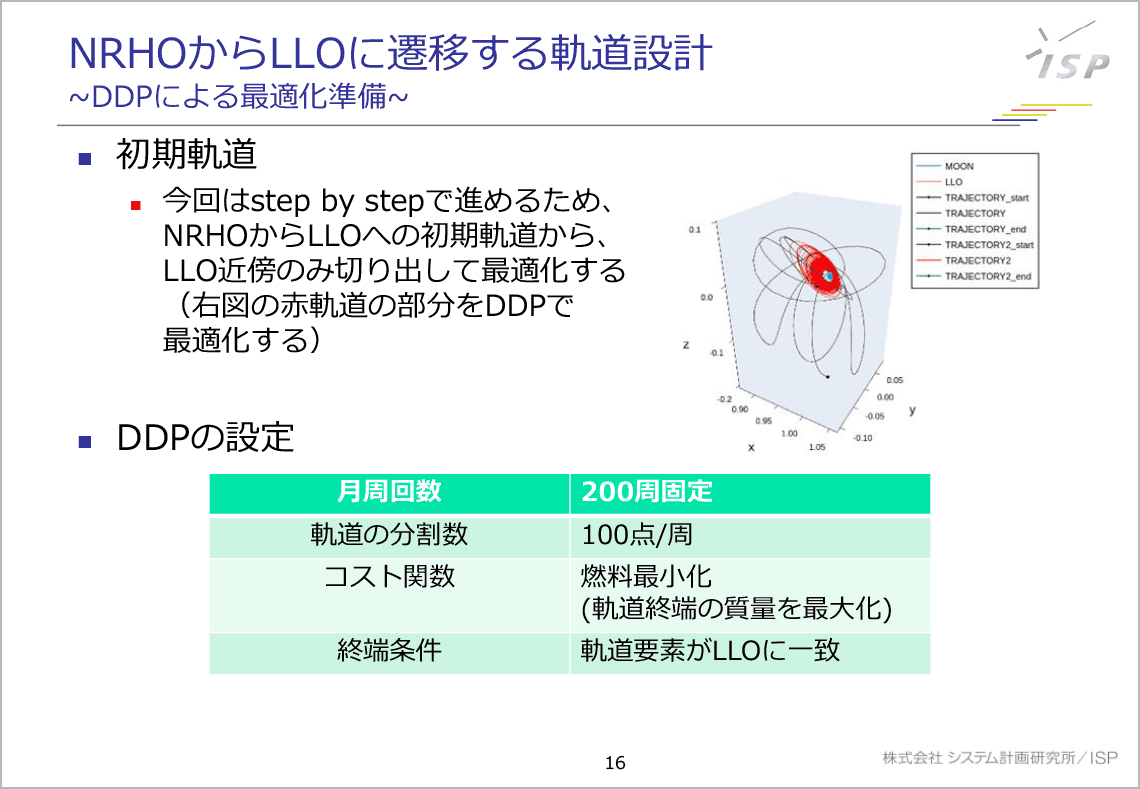
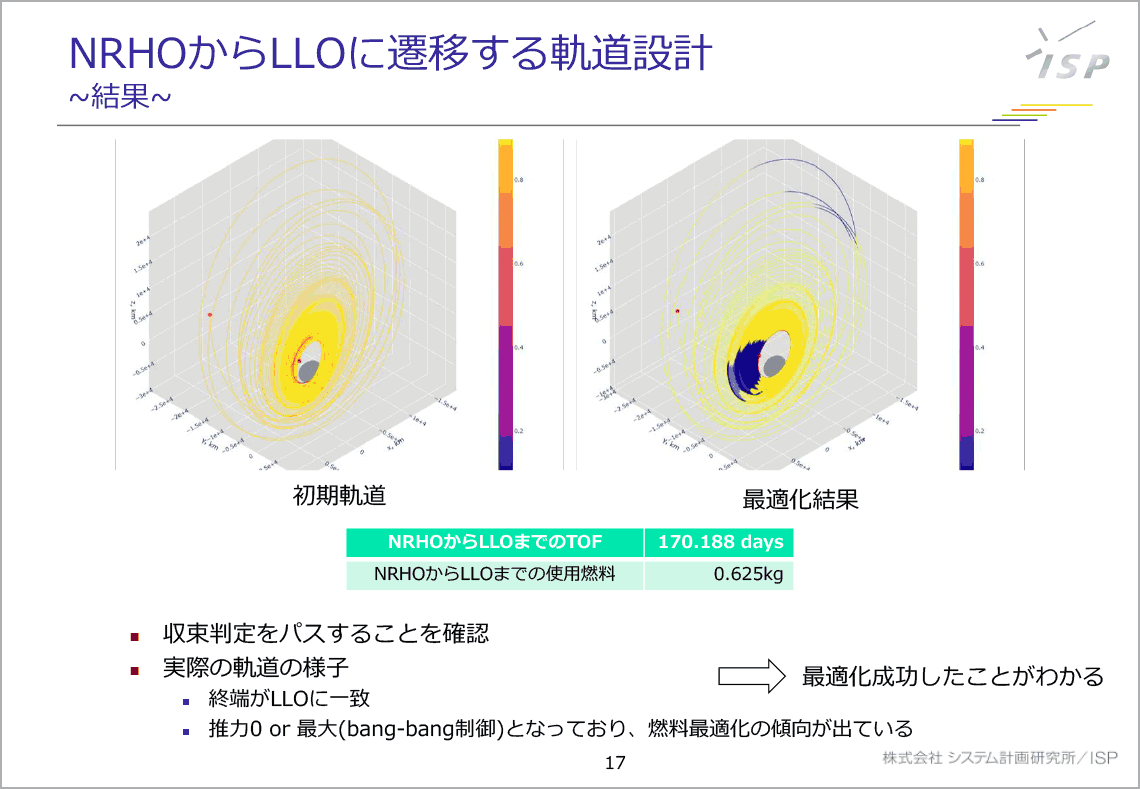
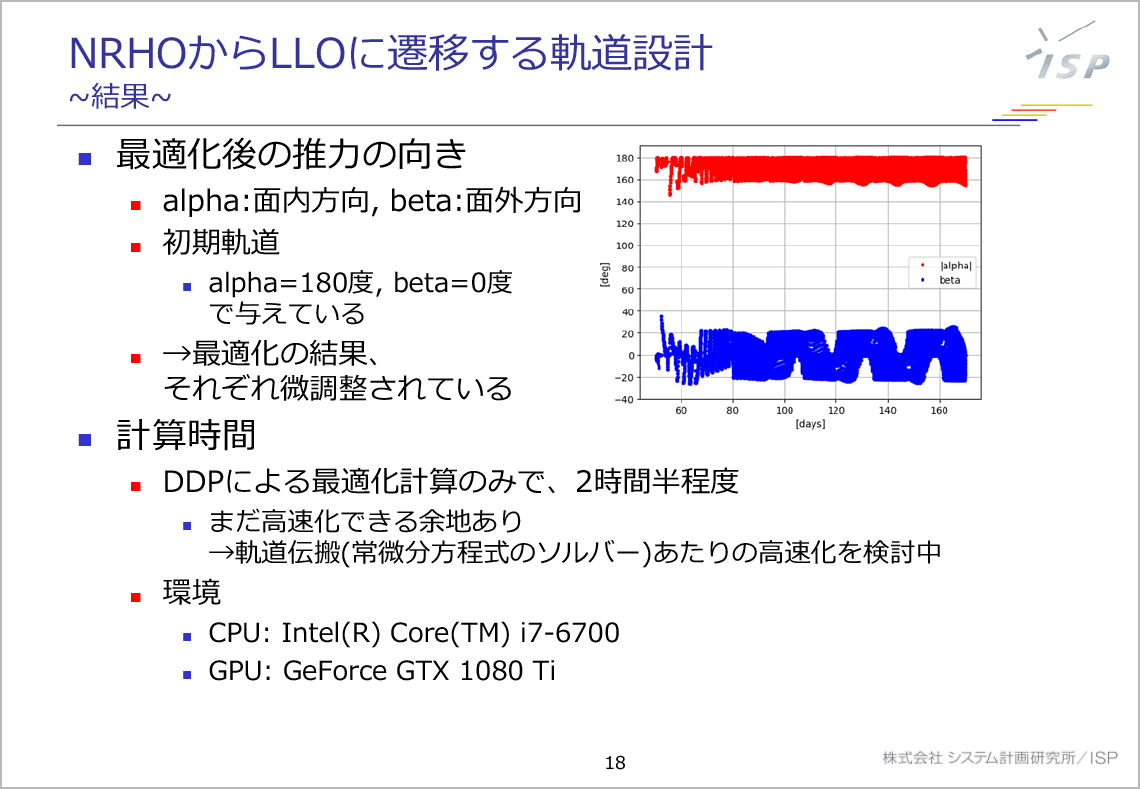
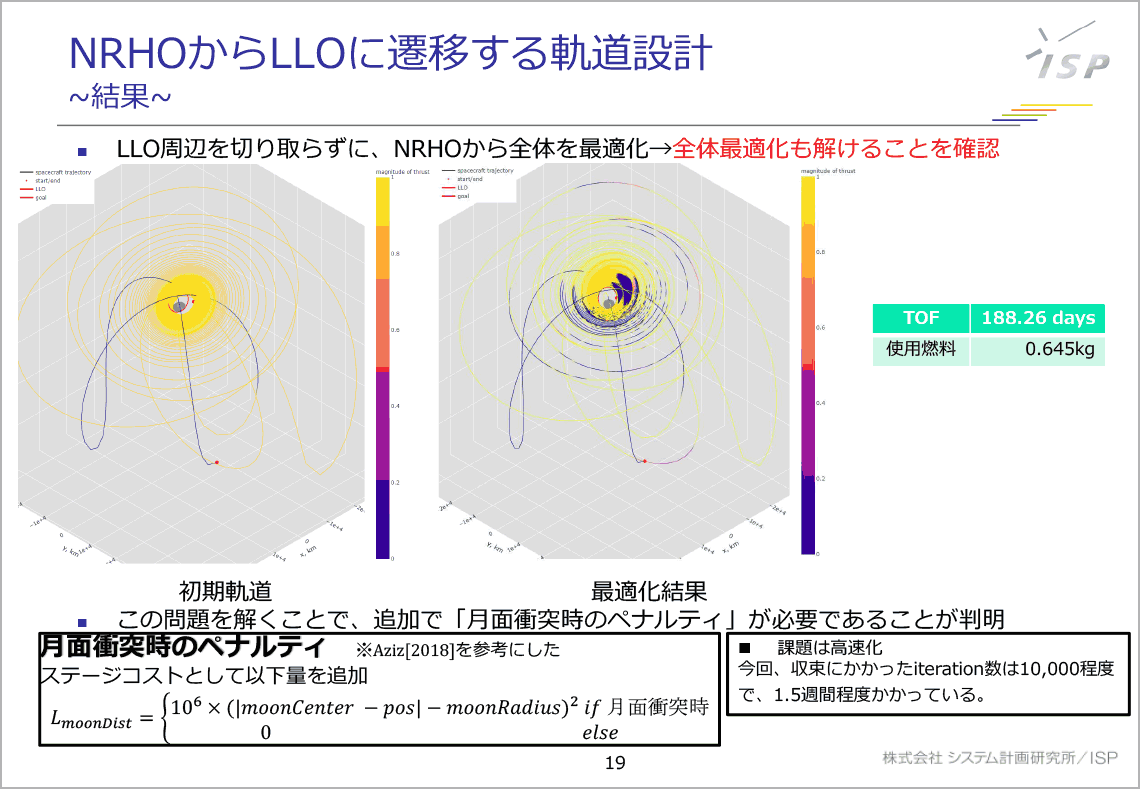
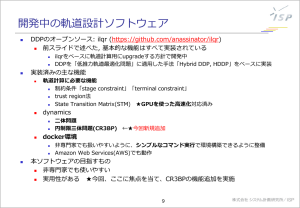
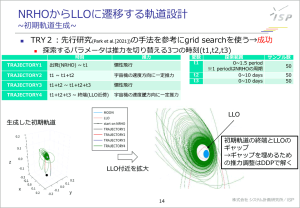
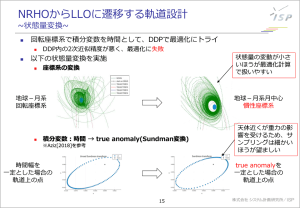
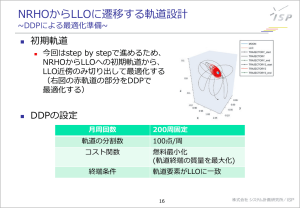
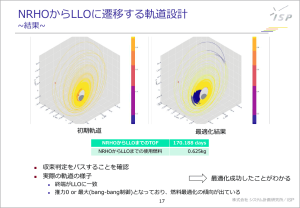
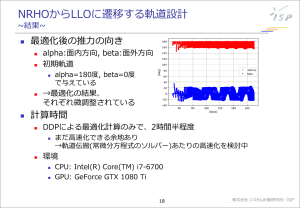
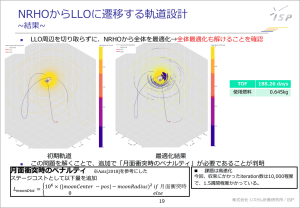
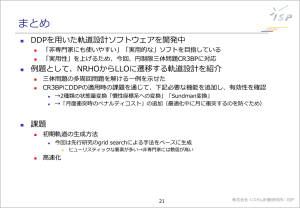
| 講演タイトル | DDPを用いた軌道設計ソフトウェアの開発状況 ~NRHOからLLOに遷移する軌道設計の事例紹介~ |
| 発表者 | ISP/児玉 俊 |
| 共同研究者 | JAXA/尾崎 直哉准教授、東京大学/近澤 拓弥さん |



宇科連は宇宙科学技術に関する国内最大級の会議です。非常に多くの方が参加され、満席となる講演がいくつもありました。ISPの講演にも、多くの方にご聴講いただき、関心を持っていただきました。

聴講した講演の紹介
興味深いと感じた講演をいくつかピックアップして簡単に紹介します。
国内宇宙産業の課題
OS10 パネルディスカッション「世界と戦うために望まれる宇宙業界の有機的連携とは」 を聴講しました。政府が主導して宇宙開発を進めるOld Spaceと、民間企業が主導して進めるNew Spaceへと構造が変化していく中で、海外と比較し、日本がうまく適応できてない問題について、各方面の専門家の方々が議論されました。
民間企業がなかなか参入できていない理由の一つに、宇宙ミッションにおける「打ち上げ→宇宙巡航→探査」のうち、難しいといわれる「宇宙巡航」から行う必要がある点が挙げられていました。関連すると考えられる講演として、3C15 月面探査ローバーYAOKIが実現する民間企業による月面事業創造も聴講し、この課題に対する一つのアプローチになるように思い、興味深かったです。
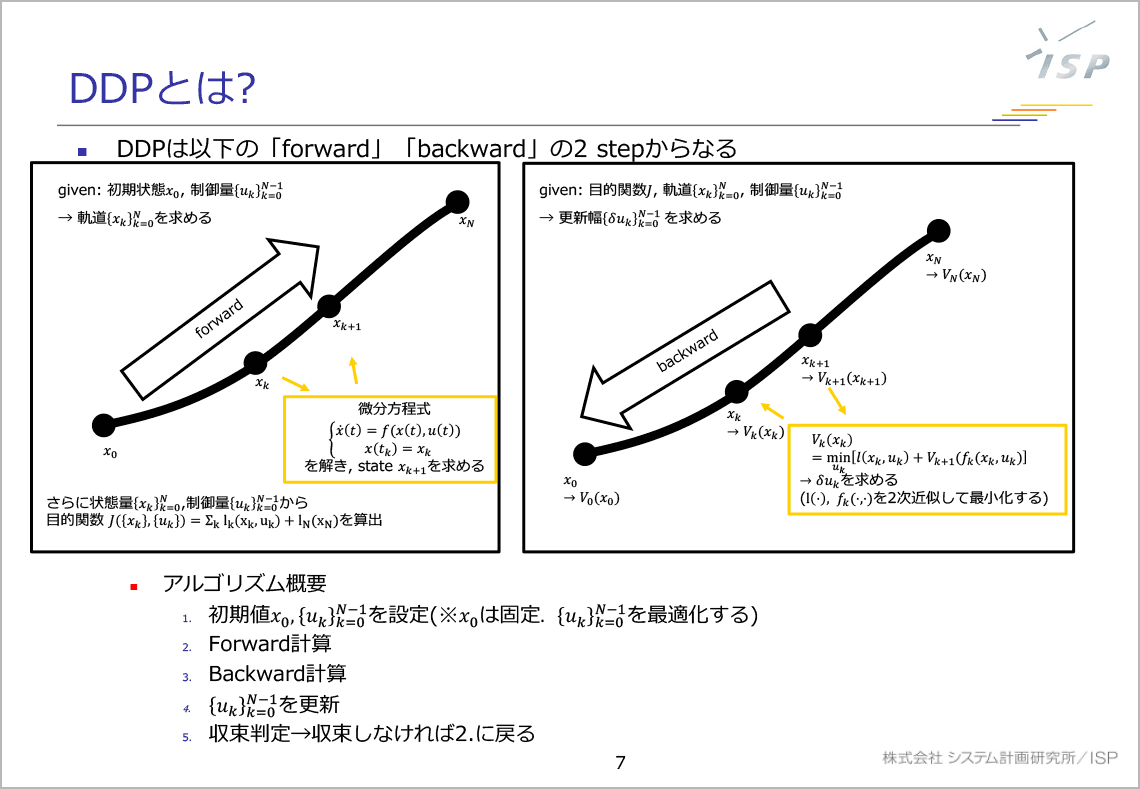
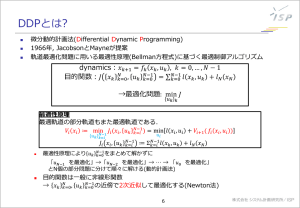
DDPに関する研究
私の発表以外にも、Dynamic Differential Programming(DDP)を使った研究がいくつかありました。例えば、2F01 運用上の不確定性を考慮した低推力多周回軌道設計手法に関する研究や2F03 非線形性指標を用いた宇宙機の低感度軌道設計です。軌道設計分野におけるDDPの活用について、今まさに研究が進んでいる中で、様々な応用・発展形を知ることができ、勉強になりました。私たちが開発しているソフトでも参考にしたいと思います。
月面ローバの自律走行のための技術
2R10 ローバの航法誘導制御系検証を目的としたUnreal Engine 5による月面シミュレータの開発を聴講しました。UE5の使用した機能や月面データの反映方法など、具体的な内容の説明もあり、参考になりました。
また、2R12 月面ローバ研究モデルを用いた自己位置推定手法の評価も聴講しました。私自身、地上環境での自律走行システム・自己位置推定の開発・評価は経験があり、月面ローバでの自己位置推定における難しい点など、興味深く感じました。