ISPは2017年6月23日に一般社団法人 日本シミュレーション学会 合同研究会にて講演を行いました。 講演は「シミュレーション環境における強化学習と実環境への適用」をテーマに、ロボットに動作を学ばせるため、シミュレーション環境を用いて学習を高速に進める取り組みの紹介です。
(ISP 長澤和樹)
講演内容(一部抜粋)
目的は、強化学習の仕組みを使い、ロボットに動作を学習させること。
ロボットに動作を繰り返させ、都度それを評価することで最適な動作を学習させることが狙いです。 しかし、実機を動かすには時間や費用など、多大なコストを要します。
それを解決するために、シミュレーション環境上での学習を試みたのが今回の取り組みです。
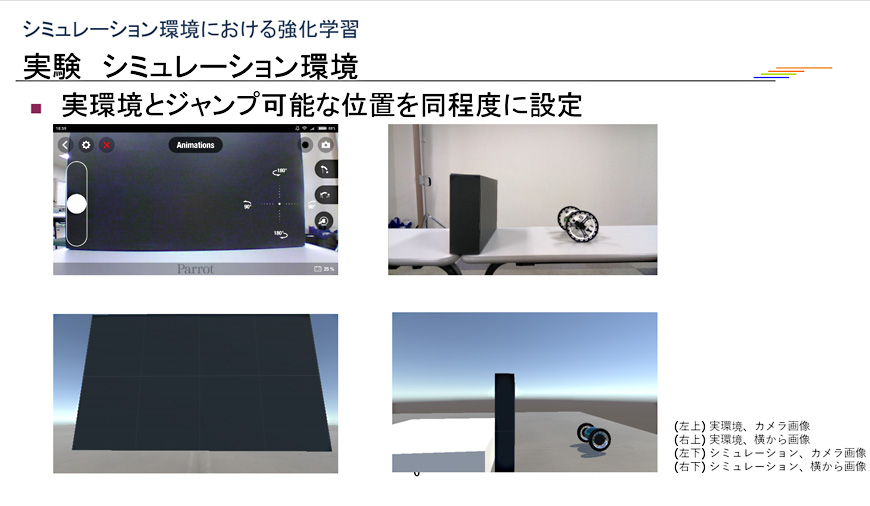
(下段):シミュレーション環境でのドローンと、ドローンの目線カメラ映像
今回対象としたのは「ドローン」。二輪で走行し、バネでジャンプすることも可能です。
搭載されたカメラの映像を入力データとし、強化学習を行います。
障害物を飛び越せる位置まで近づき、ジャンプして飛び越えることが目標です。
成功したら「正の報酬」、失敗したら「負の報酬」を与え、シミュレーション環境にて学習を繰り返します。
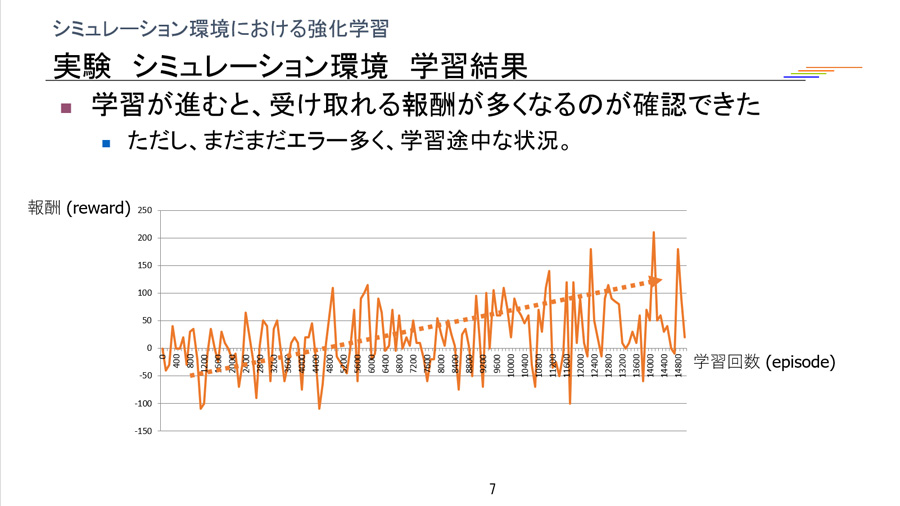
学習を繰り返していくにつれて、徐々に上手く動作するようになってきました。
今回はドローンにて実験を行いましたが、例えば、工場などで使われる、巨大で高価なロボットを対象とした場合、実機を動かすのは一苦労ですが、シミュレーション環境上なら何度でも学習が行え、動作の評価も容易に行うことが可能です。
ドローン動作の様子(動画)
シミュレーション環境での学習と、ドローンの実機の様子です。
講演資料
講演資料は以下に公開しています。
今回紹介しきれなかった内容や、より詳しい情報などが掲載されております。是非一度ご覧ください。
講演内容、資料についてのご意見、ご質問は以下へお問い合わせ下さい。
ai-contact@isp.co.jp
●関連リンク
日本シミュレーション学会_合同研究会開催概要ページ
システム計画研究所:AIシステム事業紹介ページ
技ラボ:学習対象を撮らずに学習してみた