前回の記事(ROS2 タイマーの解析と実験)では、タイマーの起床処理を解析し、最終的な就寝にfutexシステムコールが呼ばれていることと、タイマーがシステム時刻の調整に影響を受けることを確認しました。
今回はタイマーの起床レイテンシを測定しました。
タイマー起床試験

起床レイテンシを測定するために、周期的に起床と就寝を繰り返すテストケースを用意しました。
起床レイテンシは、設定された起床時刻から、関数が実行開始される時刻までと定義しています。ROS2のタイマーコールバックの場合、rcl層で設定されている起床時刻から実際にコールバックを実行開始するまでの時間になります。
今回は、以下の3パターンの測定と比較を行いました。
- タイマーコールバックの起床レイテンシ
- futex の起床レイテンシ
- nanosleep の起床レイテンシ
周期は起床と就寝の処理が十分間に合うように、長めの10msとし、それぞれパターンで10分間測定しました。測定環境は リアルタイム性能の測定に向けたRaspberryPi3のセットアップ で用意したRaspberryPi 3B+です。
タイマーコールバックに設定された起床時間は、rcl層のAPIとして公開されていません。そこで今回は、起床予定時刻の取得用にAPIを追加して測定しました。追加したAPIの差分については、 githubで公開しているrcl/timerの差分 をご覧ください。
futexはROS2の就寝時に最終的に実行されるシステムコールです。通知による起床が可能ですが、ROS2の実装(正確にはstd::condition_variable::wait_for)に合わせてタイムアウトオプションで起床させました。futexの起床レイテンシとタイマーコールバックの起床レイテンシを比較することで、ROS 2のレイヤによる起床時のオーバーヘッドが測定できます。
加えて、高精度なタイマーであるnanosleepの起床レイテンシも測定しました。
futexとnanosleepの測定は擬似的なコードで書くと、以下のようになります。
int mem; // futex 通知用
int main(int argc, char *argv[]) {
// スレッドの優先度を98に設定。
struct timespec period; // 10ms に設定
struct timespec expected, wakeup, latency;
clock_gettime(CLOCK_MONOTONIC_RAW, &expected);
for (unsigned long i = 0; i < 60000; i++) {
// expected = expedted + period
clock_nanosleep(CLOCK_MONOTONIC, TIMER_ABSTIME, &expected, NULL);
// syscall(SYS_futex, &mem, FUTEX_WAIT_BITSET_PRIVATE | FUTEX_CLOCK_REALTIME,
// mem, &expected, nullptr, FUTEX_BITSET_MATCH_ANY);
clock_gettime(CLOCK_MONOTONIC, &wakeup);
// レイテンシの計算 latency = wakeup - expected
}
// 測定結果のファイル書き込み
return 0;
}
測定結果

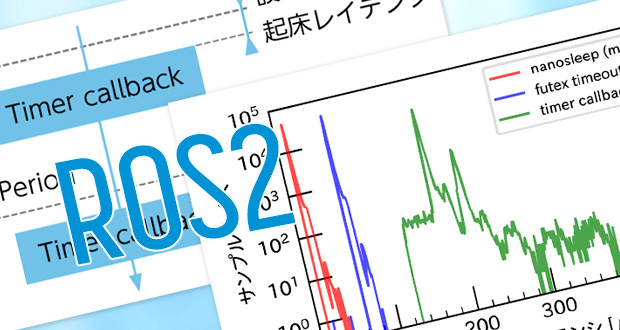
上の図は、緑色がタイマーコールバックの起床レイテンシ、青色がfutexの起床レイテンシ、赤色がnanosleepの起床レイテンシを示しています。
最悪値の比較では、レイテンシの小さい順に、nanosleep, futex, タイマーコールバックとなりました。タイマーコールバックの起床時間は、 futex システムコールの起床時間よりも最悪350us 程度遅く、ROS 2のレイヤによるオーバーヘッドが350 us 生じることを示しています。nanosleepの起床レイテンシが最悪で38us、タイマーコールバックの起床レイテンシが最悪で439usなので、オーダーひとつ分の差が生じています。futex システムコールのように通知による起床を必要とせず、タイマーでの起床のみで十分な場合、nanosleepで周期的な処理はROS2のタイマーを使わずに自前で実装すると、起床レイテンシが改善できそうです。
今回測定したケースはコールバックが1つしかないケースだったため、rclcpp層のエグゼキュータによるスケジューリングによる影響は小さいです。通常のアプリケーションでは、ノードは複数のコールバックを実行しますが、subscribeコールバックの実行中にタイマーが起床した場合など、他のコールバックに待たされ、測定した350usよりもタイマーコールバックの実行が遅れるケースがあるので注意が必要です。